Suverénní vítězství českého týmu v soutěži autonomních vozidel

![]()
— vydáno 2. září 2024
Úspěšné léto zažil tým katedry řídicí techniky z Fakulty elektrotechnické ČVUT. Poté, co zdejší studenti získali s velkým náskokem první místo v soutěži autonomně řízených vozidel, která se od 10. do 12. července 2024 konala v rámci American Control Conference v Torontu, padlo rozhodnutí založit na FEL ČVUT nový intenzivní vzdělávací kurz s mezinárodní účastí. „Díky soutěži jsme si uvědomili, že minimálně 38 světových univerzit by ocenilo know-how v oblasti řídicích systémů, které se vyučuje v Praze, tedy specificky řízení jízdní dynamiky a její roli v autonomních vozech. Proto jsme zahájili přípravu intenzivního mezinárodního kurzu na toto téma od roku 2025, a to ve dvou verzích – akademické pro studenty a učitele univerzit a průmyslové pro odborníky z firem, “ říká docent Tomáš Haniš.
Inzerce
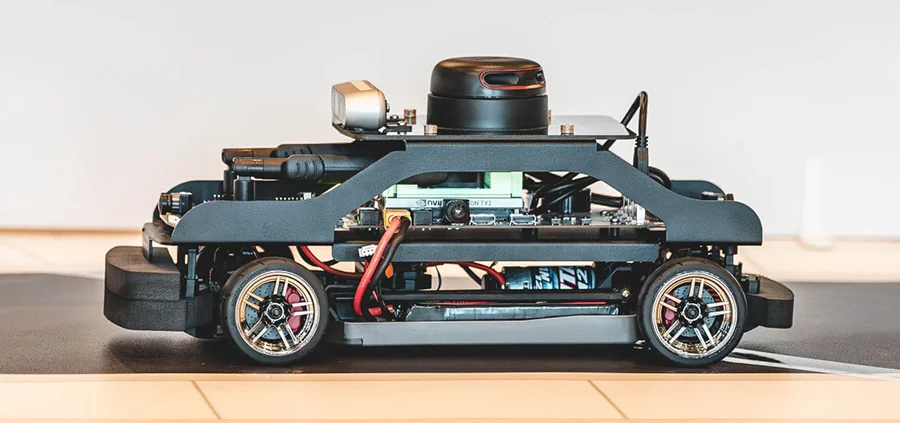
Cílem soutěže Self-Driving Car Student Competition bylo vyvinout řídicí systém autonomního vozu, který by zadanou trasu zvládl projet co nejrychleji a bez jakýchkoliv vnějších zásahů. Mezi další kritéria hodnocení však patřila i přesnost jízdy a včasné reakce na dopravní značení; na trase totiž byly umístěny i dva semafory a značka STOP. Studenti tak museli implementovat funkce jako fúze dat jednotlivých senzorů vozu, návrh řízení dynamiky vozu a vedení po trati, plánování trajektorie a systémy zpracování obrazu pro detekci silnice a dopravního značení. Samotná implementace systému pak probíhala na platformě vozidla zmenšeného v měřítku 1:10.
Do Kanady se na soutěž vypravilo pět magisterských studentů programu Kybernetika a robotika společně s kapitánem týmu, doktorandem Janem Švancarem, který působí na katedře řídicí techniky FEL ČVUT. Role v týmu si studenti rozdělili dle svých zkušeností a zálib. Jan Kohout se společně s Jakubem Macarem věnoval jízdní dynamice vozu a vedení po trati, dvojice Ondřej Mikoláš a Martin Bílík měla na starosti zpracování obrazu, zatímco Jan Švancar a Otakar Kodytek prováděli softwarovou integraci. „Nakonec ale každý dělal to, co bylo zrovna potřeba, včetně občasného spánku,“ dodává docent Tomáš Haniš z katedry řídicí techniky FEL ČVUT, který v týmu působil jako odborný poradce a rovněž zajišťoval organizaci a zdroje potřebné k realizaci projektu. Na úloze se podíleli ještě další čtyři studující, kteří na finále z finančních důvodů odletět nemohli; Kateřina Hobzová se zabývala přípravou tratí a kalibrací kamer, Ondřej Kuban pracoval na identifikaci jízdní dynamiky vozu, Martin Jeřábek se staral o zpracování dat senzorů vozu a Jan Hadraba se věnoval implementaci funkcí pro lokální plánování.
Než se však tým mohl těšit na finále a cestu do Toronta, musel projít prvním kolem soutěže. Příprava na něj trvala dva měsíce, během kterých studenti vyvíjeli jednotlivé funkce systému a implementovali je ve virtuálním prostředí. Pro tento projekt jim katedra řídicí techniky vyčlenila místnost, ve které se mohli scházet a nerušeně pracovat; po ruce jim zde byla i vytištěná mapa trasy, dva semafory a značka STOP. K dispozici měli také nástroje od společnosti Quanser, která soutěž pořádala, konkrétně digitální dvojče daného vozidla. Prvního kola soutěže se zúčastnilo celkem 39 univerzit z celého světa, konkurenci měl tedy tým z FEL ČVUT velkou.
Do druhého kola pražský tým postoupil s dalšími 10 vysokými školami, mezi soupeři byly instituce jako například University of Seoul, California Polytechnic State University či Beijing University of Technology. Tyto týmy získaly od pořadatele v předstihu již fyzické vozidlo QCar, na kterém si před odletem do Toronta mohly své algoritmy otestovat. „Jak to tak bývá, úsilí týmu gradovalo s blížící se soutěží a odletem do Toronta,“ popisuje doc. Haniš. „Pravé sportovní nadšení teprve nastalo během soutěžních dnů a několika probdělých nocí, kdy celý tým pracoval na předělání, dodělání a naladění jednotlivých funkcí,“ dodává. Druhé kolo bylo totiž záludné v tom, že vozidla jezdila po povrchu, se kterým se týmy seznámily až na místě, i proto tak byly soutěžní dny opravdu intenzivní.

Do finále se tým Fast & Driverless z FEL ČVUT probojoval jako jeden ze tří nejrychlejších týmů a nakonec vystoupal na ten nejvyšší stupínek. Jejich koncept řídicího systému vynikal především svou rychlostí; nejrychleji dokázalo v kvalifikaci jejich vozidlo trasu dlouhou přibližně 19 metrů zdolat za 19,8 sekund, tým však bohužel obdržel dvousekundovou penalizaci za překročení limitu trati. Jelikož ale čas nejrychlejších soupeřů byl zhruba 25,5 sekundy, rozhodli se studenti z FEL ČVUT neriskovat a ve finále trochu zpomalit na vítězný čas 23,472 sekund. Důležitá byla také spolehlivost, se kterou dokázal systém rozpoznat dopravní značení; vozidlo tak bylo schopno autonomně zastavit před značkou STOP či vyčkat na zelenou na semaforu. Jako klíčová se však ukázala přesnost sledování trajektorie, a to zejména při vysokých rychlostech, kde měli soupeři velké potíže.
Kromě zkušeností a zážitků si tým ze soutěže jako výhru odnesl i zlatou trofej QCar a finanční odměnu, kterou si mezi sebou studenti rozdělili. Součástí výhry je i QCar a roční předplatné digitálního dvojčete QLabs Virtual QCar, které katedra plánuje využít především ve výuce bakalářských a magisterských předmětů zaměřených na návrh řídicích systémů.
„Do soutěže jsme se přihlásili s tím, že to zkusíme a uvidíme. Přestože jsem od začátku viděl, že studenti jsou velmi nadaní a pracují na soutěži s velkým zájmem, neměl jsem srovnání a netroufal jsem si představit, kde se můžeme umístit,“ popisuje doc. Haniš. S těmito nástroji se tým z FEL ČVUT setkal poprvé, a na rozdíl od soupeřů s nimi tak studenti neměli tolik zkušeností. Přesto se jim však podařilo zvítězit. „Právě proto je první místo naprosto skvělý výsledek, který si tým rozhodně zaslouží,“ chválí své studenty doc. Haniš.
Další článek: Nová ložiska s nízkými emisemi znečišťujících částic